TL;DR Prediksi dan Pelacakan Beam Berbantuan GPS untuk Komunikasi dengan UAV pada pita frekuensi mmWave
[Read the English version here].
Artikel ini menyajikan versi singkat (TL;DR) dari penelitian saya tentang prediksi dan pelacakan beam berbantuan GPS untuk komunikasi dengan UAV pada pita frekuensi mmWave. Bagi pembaca yang tertarik untuk mengeksplorasi detail implementasi, kode lengkap dapat diakses melalui repositori github ini.
Latar Belakang Penelitian
Unmanned Aerial Vehicles (UAV) diharapkan berfungsi sebagai user equipment (UE) dalam jaringan seluler [1]. Implementasi teknologi millimeter wave (mmWave) dalam koneksi seluler UAV dapat mendukung laju data tinggi dan memungkinkan berbagai aplikasi seperti pemantauan udara dan operasi tanggap darurat [2]. Karakteristik path loss yang signifikan dari mmWave mengharuskan implementasi antenna array besar di base station (BS), yang mengkompensasi kerugian ini dengan menghasilkan beam terfokus dengan kemampuan beamforming yang ditingkatkan [3]. Akibatnya, manajemen beam yang efektif—termasuk proses pelatihan dan pelacakan—sangat penting untuk komunikasi mmWave agar dapat dengan cepat membangun beam optimal selama pergerakan di dalam dan antar sel, meminimalkan masalah keselarasan beam [4]. Selain itu, mobilitas tinggi UAV menciptakan fluktuasi dalam parameter pergerakan seperti kecepatan dan percepatan, yang memerlukan solusi manajemen beam khusus yang dirancang khusus untuk platform udara [5]. Situasi ini menekankan perlunya pendekatan kreatif untuk mengatasi tantangan ini dan membangun komunikasi mmWave yang andal dan berkinerja tinggi untuk UAV.
Model Sistem
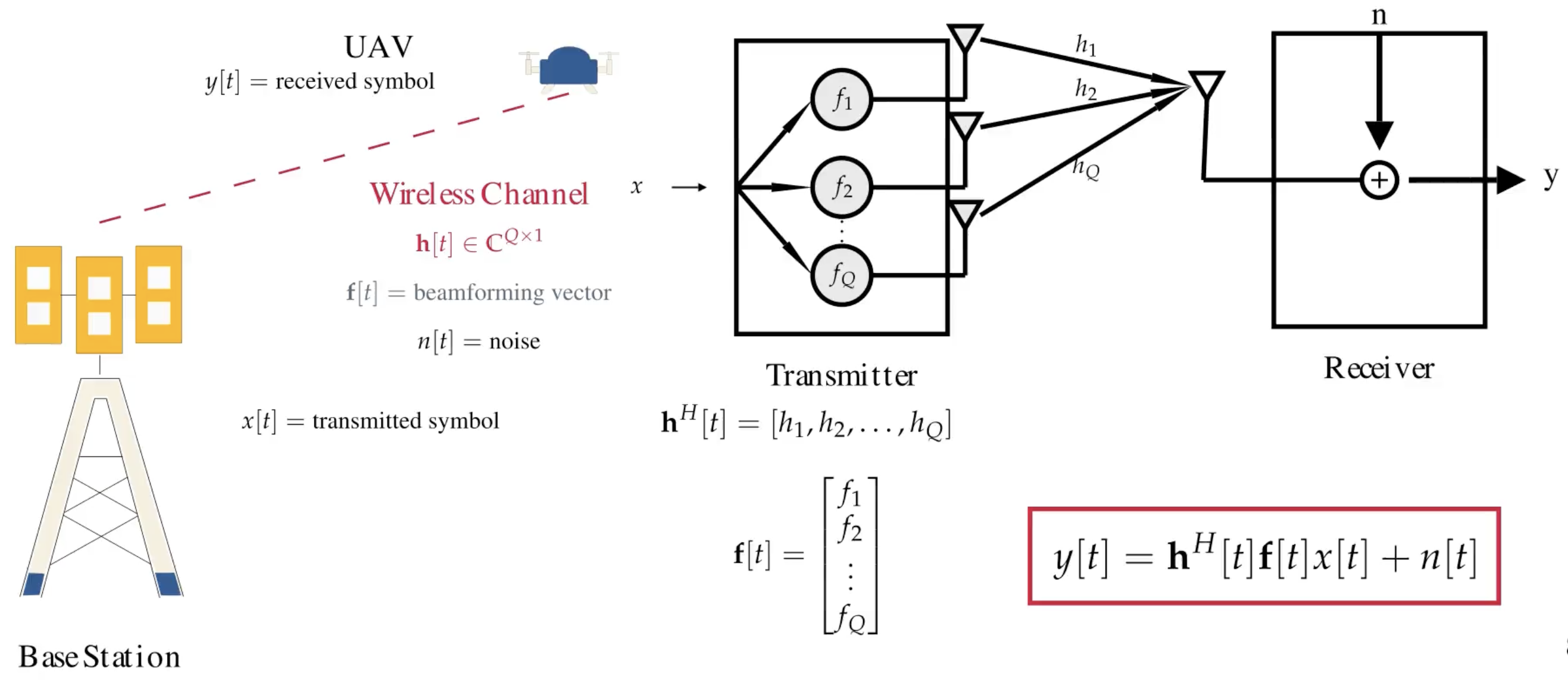
Penelitian ini mempertimbangkan BS dengan $Q$ antena dan UAV dengan satu antena (lihat Gambar 1). BS mengirimkan simbol $x[t]$ dan simbol yang diterima di UAV $y[t]$ bergantung pada koefisien saluran nirkabel $h[t]$, vektor beamforming $f[t]$, dan noise $n[t]$.
Gambar 1: Model Sistem
Konfigurasi vektor beamforming menentukan arah yang dihadapi beam dan seberapa lebar/sempitnya (lihat Gambar 2). Konfigurasi ini disimpan dalam beam codebook dengan ukuran $M$. Mengingat informasi posisi historis UAV $O$, penelitian ini bertujuan untuk memanfaatkannya untuk memilih indeks beam optimal dalam beam codebook menggunakan model pembelajaran mendalam prediksi dan pelacakan beam $f(\Theta_{bpt})$. Model ini mengembalikan indeks beam saat ini dan tiga indeks beam masa depan.
Gambar 2: Formulasi Permasalahan
Solusi yang Diusulkan
Untuk mengatasi tantangan manajemen beam untuk komunikasi mmWave UAV, pendekatan prediksi beam berbantuan GPS yang diusulkan (lihat Gambar 3) memanfaatkan data lokasi historis UE untuk memprediksi indeks beam saat ini dan tiga indeks beam masa depan.
Gambar 3: Solusi yang Diusulkan
Kerangka kerja yang diusulkan terdiri dari dua komponen utama:
Prapemrosesan Data GPS: Data geodetik (lintang dan bujur) dari UE dan BS, bersama dengan ketinggian penerbangan UE, diterima sebagai input oleh blok prapemrosesan GPS (lihat Gambar 4). Data geodetik UE dan BS dikonversi menjadi koordinat Earth-Centered Earth-Fixed (ECEF) oleh blok ini ([6], [7]). Vektor arah yang menunjuk dari BS ke UE diperoleh dengan mengurangi vektor BS dari vektor UE. Vektor ini kemudian dinormalisasi menjadi vektor satuan untuk hanya mewakili arah. Akhirnya, vektor satuan ini digabungkan dengan ketinggian penerbangan UE yang diskala secara logaritmik.
Gambar 4: Blok Prapemrosesan data GPS
Model Deep Learning: Model deep learning (lihat Gambar 5) memproses urutan informasi posisi UE dan BS dan menghasilkan urutan prediksi beam. Arsitektur model ini menggabungkan Convolutional Neural Network 1-dimensi (1D CNN), Recurrent Neural Network (RNN) encoder-decoder [8], dan jaringan fully connected. 1D CNN berfungsi sebagai pengekstrak fitur, sementara RNN encoder mengubah urutan input menjadi vektor yang merangkum informasi urutan. Vektor ini kemudian didekode kembali menjadi urutan oleh RNN decoder. Decoder menghasilkan 4 langkah prediksi (beam saat ini dan 3 beam masa depan). Karena setiap langkah perlu diklasifikasikan ke dalam indeks beam tertentu, komponen akhir model adalah lapisan fully connected. Untuk setiap langkah prediksi, lapisan ini memetakan keluaran decoder ke salah satu dari 32 kelas beam.
Karena ini adalah model klasifikasi, model ini dilatih menggunakan Cross-Entropy Loss.
*Gambar 5: Arsitektur Model *Deep Learning**
Pengaturan Evaluasi
Informasi Set Data
Set Data diperoleh dari Deep Sense 6G Scenario 23 [9]. BS dikonfigurasi dengan phased array 16 elemen yang beroperasi pada pita 60 GHz dan menggunakan codebook dengan 32 beam yang telah ditentukan sebelumnya. UE terdiri dari drone yang dikendalikan dari jarak jauh yang dilengkapi dengan pemancar mmWave yang beroperasi pada 60 GHz, penerima GPS, dan inertial measurement units (IMU).
Pembagian Set Data
Set data terdiri dari 11.387 sampel, yang dibagi menjadi set pelatihan, validasi, dan pengujian dengan rasio masing-masing 65%, 15%, dan 20%. Pendekatan umum untuk pembagian set data melibatkan pembagian berurutan (lihat Gambar 6). Namun, metode ini menghasilkan distribusi label yang tidak seimbang; misalnya, label ke-0 tidak memiliki sampel dalam set data pelatihan. Ketidakseimbangan ini menciptakan masalah karena model tidak dapat mempelajari pola yang terkait dengan label yang hilang.
Gambar 6: Pembagian Set Data Berurutan
Penelitian ini mengimplementasikan metode pembagian alternatif dengan memecah set data dan menyesuaikan distribusi label (lihat Gambar 7 dan 8). Strategi pembagian dimulai dengan membuat beberapa bongkah (chunk) dari set data mentah. Setiap bongkahan berisi bagian yang dialokasikan untuk pelatihan, validasi, dan pengujian. Bagian-bagian ini kemudian dikelompokkan berdasarkan tujuan masing-masing (pelatihan, validasi, atau pengujian).
Gambar 7: Pembagian Set Data Berbongkah
Dampak dari pendekatan ini, label ke-0 sekarang memiliki beberapa sampel dalam set data pelatihan. Namun, komposisi pelatihan-validasi-pengujian tetap tidak konsisten di berbagai label. Misalnya, label ke-2 berisi lebih banyak sampel dalam set data validasi daripada dalam set data pengujian, sementara label ke-4 menunjukkan lebih sedikit sampel dalam set data validasi dibandingkan dengan set data pengujian. Untuk mengatasi ketidakkonsistenan ini, jumlah sampel dalam setiap label disesuaikan sesuai dengan rasio pelatihan-validasi-pengujian yang diinginkan, memastikan distribusi sampel yang konsisten di semua label (lihat Gambar 8).
Gambar 8: Pembagian Set Data yang Disesuaikan
Transformasi Set Data
Karena ini adalah model pembelajaran terawasi (supervised learning model), set data harus ditransformasikan menjadi pasangan contoh input dan label keluaran yang sesuai (lihat Gambar 9). Input terdiri dari informasi historis tentang posisi UE dan BS, sementara keluaran terdiri dari indeks beam saat ini dan tiga indeks beam masa depan. Dalam penelitian ini, semua input dan keluaran dipastikan memiliki indeks urutan $q$ yang sama (indeks $q$ mengelompokkan semua sampel data yang dikumpulkan selama satu lintasan UE saat bergerak melewati BS). Ketika kondisi ini tidak dapat dipenuhi, model menggunakan setidaknya informasi posisi saat ini/ posisi terbaru, dengan data historis yang hilang diisi dengan nilai nol.
Gambar 9: Transformasi Set Data
Hiperparameter Pelatihan
Proses pelatihan model menggunakan hiperparameter berikut: 20 epoch untuk siklus pelatihan lengkap, batch size 8 untuk data pelatihan, dan batch size yang lebih besar yaitu 1024 untuk validasi dan pengujian. Optimizer Adam digunakan dengan learning rate awal 5e-4 dan tanpa weight decay. Learning rate dikurangi dengan faktor 0,1 pada epoch 12 dan 18.
Kinerja Model
Secara keseluruhan, model menunjukkan kinerja yang kuat dengan akurasi Top-1 secara konsisten melebihi 71% dan akurasi Top-3 melebihi 95% di semua langkah prediksi beam (lihat Gambar 10). Kinerja ini mewakili peningkatan dibandingkan model dasar yang disajikan dalam [10]. Selain itu, power loss rata-rata Top-1 tetap di bawah 0,85 dB di semua langkah prediksi, menunjukkan bahwa bahkan ketika prediksi Top-1 tidak tepat, power loss yang dihasilkan kurang dari 20%.
Gambar 10: Hasil Keseluruhan
Salah satu daktor yang meningkatkan kinerja model adalah metodologi prapemrosesan yang diimplementasikan. Seperti yang diilustrasikan dalam tabel pada Gambar 10, mengubah input dari ketinggian penerbangan mentah ($H_{UE}$) menjadi ketinggian penerbangan yang diskala secara logaritmik ($H_{UE,ln}$) menghasilkan peningkatan yang signifikan, termasuk peningkatan akurasi dan pengurangan power loss rata-rata di semua langkah prediksi.
Gambar 11: Dampak Pembagian Set Data pada Kinerja Model
Penelitian ini lebih lanjut mengevaluasi dampak metode pembagian set data dengan membandingkan pendekatan pembagian set data berurutan dan yang disesuaikan. Gambar 11 menunjukkan bahwa melatih model menggunakan metode pembagian yang disesuaikan meningkatkan akurasi model sekitar 20%~25% dan mengurangi power loss rata-rata sekitar 25%~28% untuk prediksi hingga beam masa depan ke-2.
Dalam hal pengurangan overhead pelatihan beam [11], model menunjukkan efisiensi yang menjanjikan dengan berpotensi mengurangi persyaratan pelatihan hingga 94% (hanya membutuhkan 1-2 beam dibandingkan dengan pelatihan 32 beam penuh) sambil bertujuan untuk mempertahankan ambang keandalan akurasi 80% (lihat Gambar 12).
Selain itu, keandalan rerata kehilangan daya model menunjukkan bahwa 93,4% hingga 96,0% dari prediksi Top-1 menghasilkan kehilangan daya 1 dB atau kurang.
Gambar 12: Penghematan Beban Pelatihan Beam dan Keandalan Rerata Kehilangan Daya
Kesimpulan
Penelitian ini menunjukkan bahwa prediksi dan pelacakan beam berbantuan GPS yang diusulkan untuk komunikasi mmWave UAV memberikan kinerja yang konsisten dengan akurasi Top-1 melebihi 71% dan mempertahankan power loss rata-rata di bawah 1 dB di semua horizon prediksi. Solusi ini secara signifikan meminimalkan overhead pelatihan beam sebesar 90%, sambil tetap memastikan akurasi pemilihan beam 95% dengan hanya menggunakan 3-4 beam dari codebook 32-beam lengkap.
Referensi
[1] Zeng, Yongs, Qingqing Wu, dan Rui Zhang. “Accessing from the sky: A tutorial on UAV communications for 5G and beyond.” Proceedings of the IEEE 107.12 (2019): 2327-2375.
[2] Xiao, Zhenyu, et al. “A survey on millimeter-wave beamforming enabled UAV communications and networking.” IEEE Communications Surveys & Tutorials 24.1 (2021): 557-610.
[3] Geraci, Giovanni, et al. “What will the future of UAV cellular communications be? A flight from 5G to 6G.” IEEE communications surveys & tutorials 24.3 (2022): 1304-1335.
[4] Xue, Qing, et al. “A survey of beam management for mmWave and THz communications towards 6G.” IEEE Communications Surveys & Tutorials 26.3 (2024): 1520-1559.
[5] Zhang, Chiya, et al. “Research challenges and opportunities of UAV millimeter-wave communications.” IEEE Wireless Communications 26.1 (2019): 58-62.
[6] Paul, M. K. “A note on computation of geodetic coordinates from geocentric (Cartesian) coordinates.” Bulletin Géodésique (1946-1975) 108.1 (1973): 135-139.
[7] Zhu, Jijie. “Conversion of Earth-centered Earth-fixed coordinates to geodetic coordinates.” IEEE transactions on aerospace and electronic systems 30.3 (1994): 957-961.
[8] Cho, Kyunghyun, et al. “Learning phrase representations using RNN encoder-decoder for statistical machine translation.” arXiv preprint arXiv:1406.1078 (2014).
[9] Alkhateeb, Ahmed, et al. “DeepSense 6G: A large-scale real-world multi-modal sensing and communication dataset.” IEEE Communications Magazine 61.9 (2023): 122-128.
[10] Charan, Gouranga, dan Ahmed Alkhateeb. “Sensing-Aided 6G Drone Communications: Real-World Datasets and Demonstration.” arXiv preprint arXiv:2412.04734 (2024).
[11] Morais, João, et al. “Position-aided beam prediction in the real world: How useful GPS locations actually are?.” ICC 2023-IEEE International Conference on Communications. IEEE, 2023.
[Read the English version here].
Artikel ini menyajikan versi singkat (TL;DR) dari penelitian saya tentang prediksi dan pelacakan beam berbantuan GPS untuk k...
Son berlari dari arah kamar kosnya menuju kamar mandi yang jauhnya sekitar 10 meter di depan kamarnya. Sekitar pukul 11 malam, ia lari di tengah lorong mele...
Ia tidak pernah membayangkan sebelumnya bahwa ada yang sama antara motor dengan dengan roket, dan antara roket dengan skripsinya. Malam itu ia duduk di sebua...
 Gambar 1: Model Sistem
Gambar 1: Model Sistem Gambar 2: Formulasi Permasalahan
Gambar 2: Formulasi Permasalahan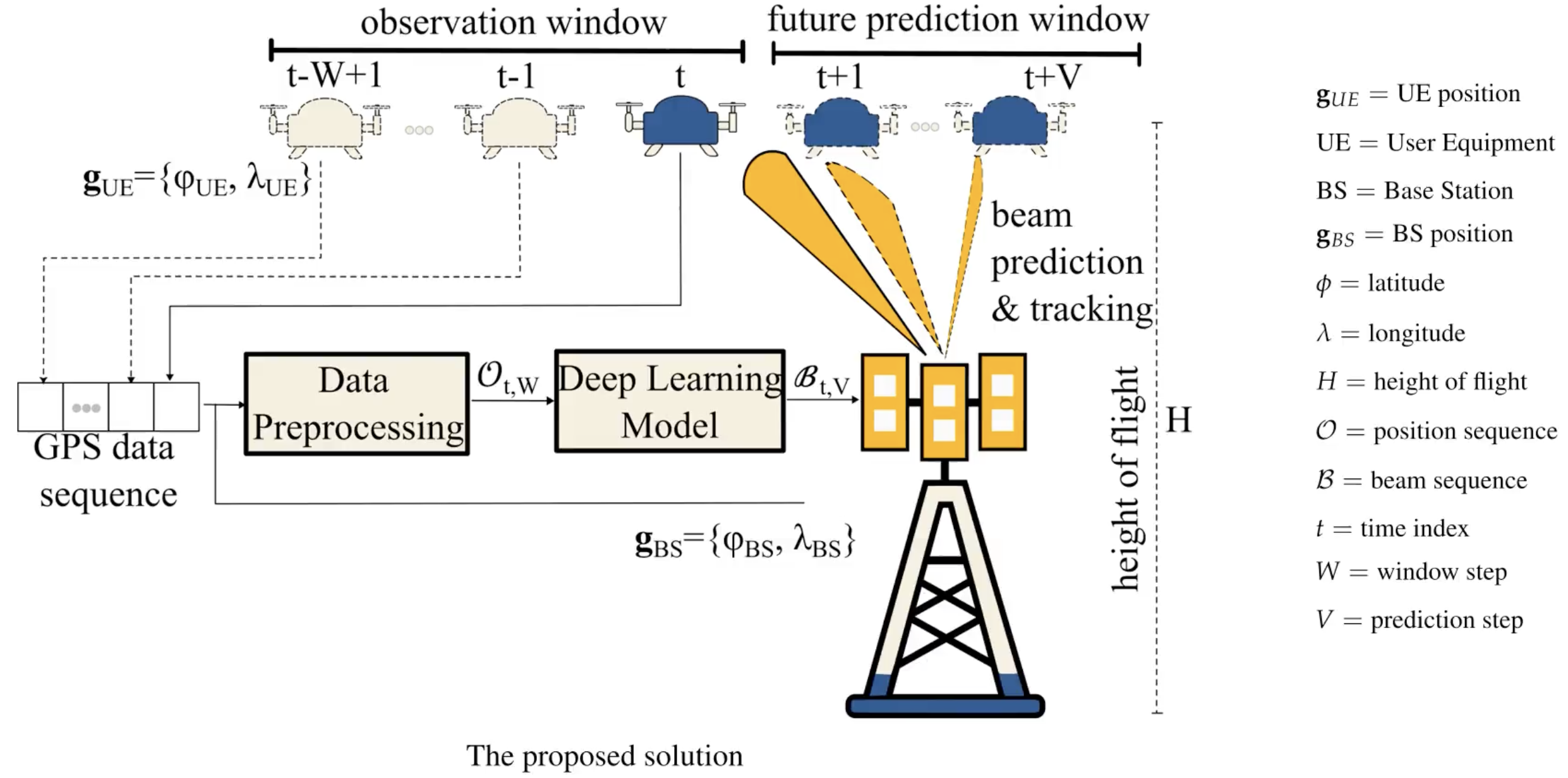 Gambar 3: Solusi yang Diusulkan
Gambar 3: Solusi yang Diusulkan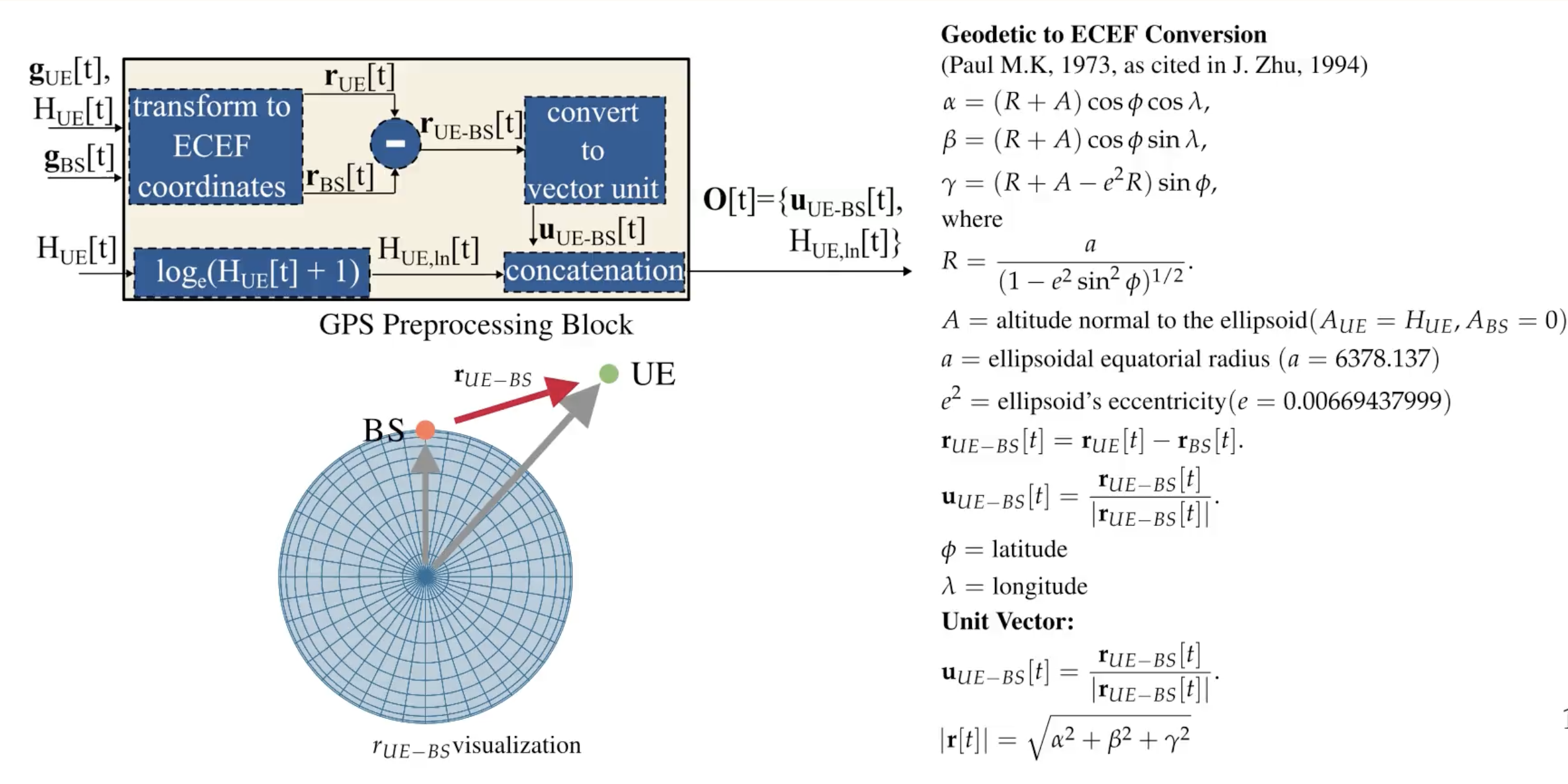 Gambar 4: Blok Prapemrosesan data GPS
Gambar 4: Blok Prapemrosesan data GPS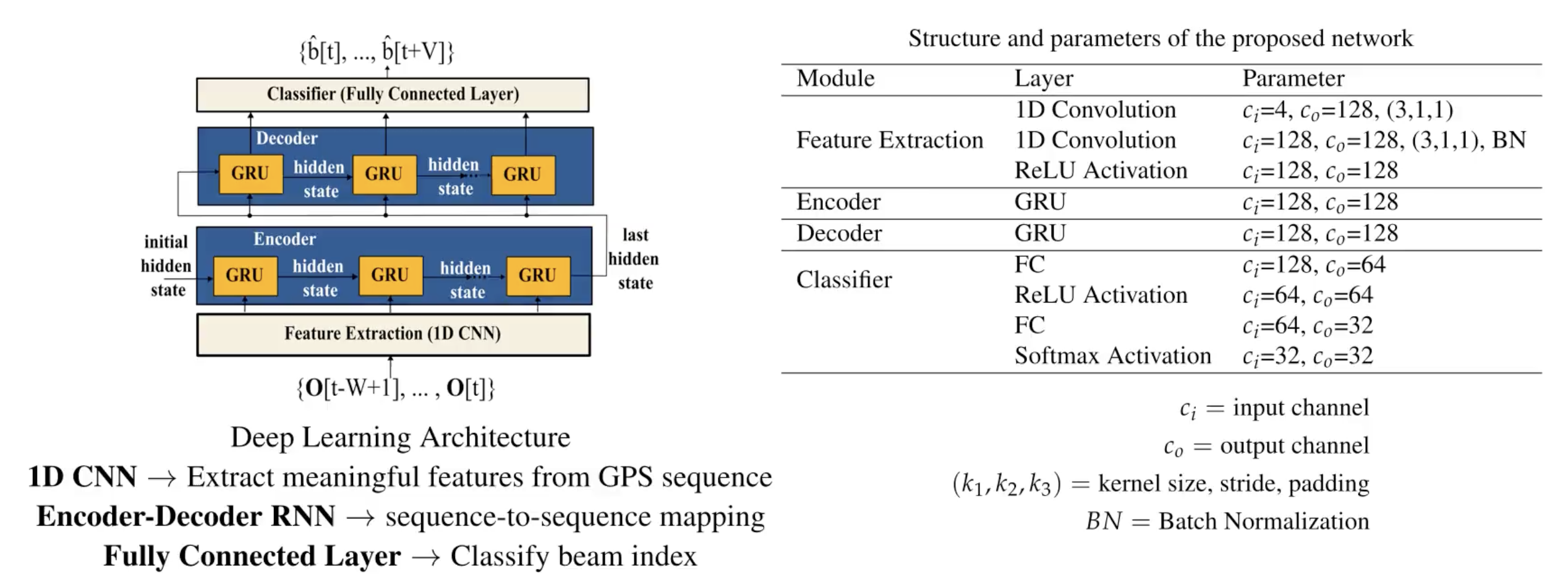 *Gambar 5: Arsitektur Model *Deep Learning**
*Gambar 5: Arsitektur Model *Deep Learning**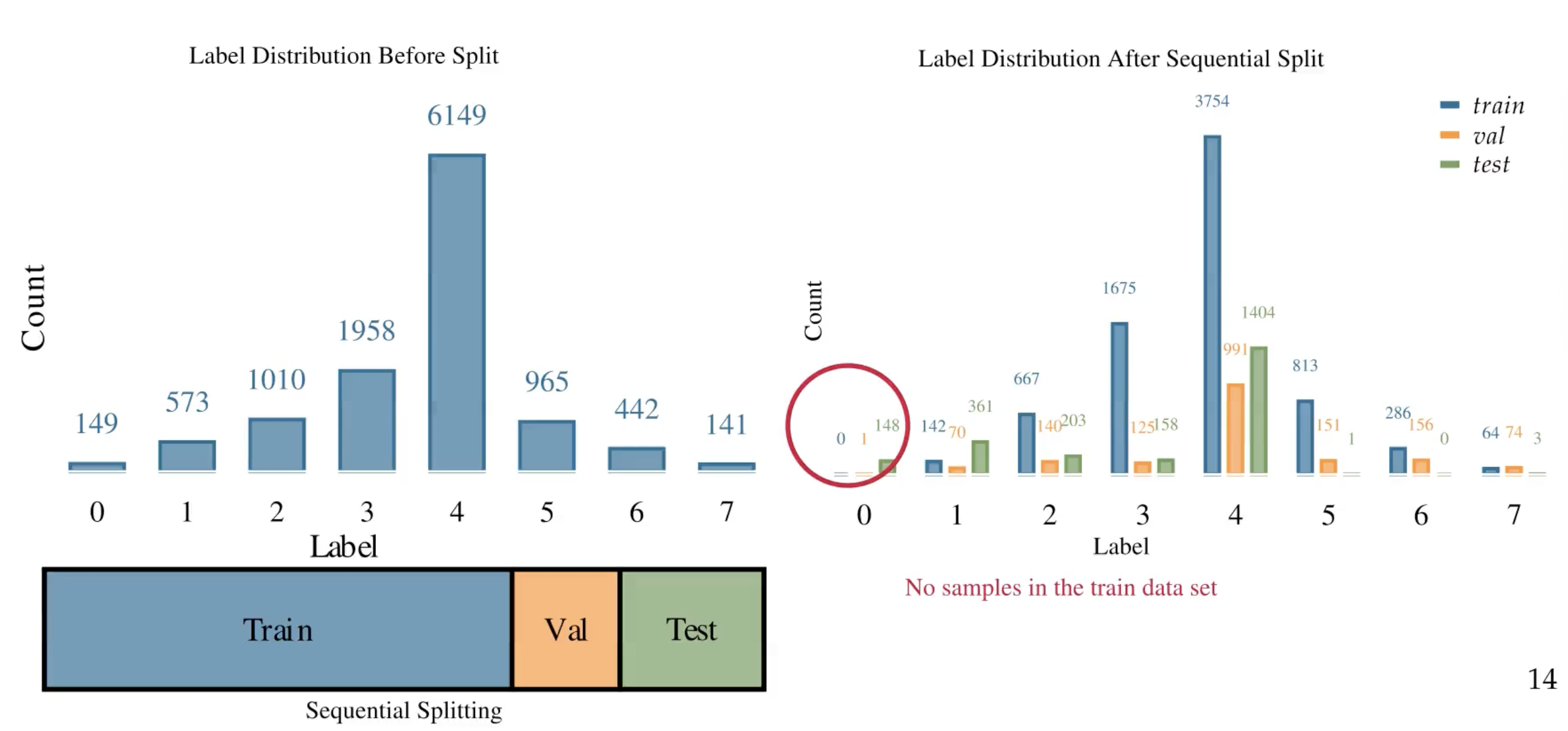 Gambar 6: Pembagian Set Data Berurutan
Gambar 6: Pembagian Set Data Berurutan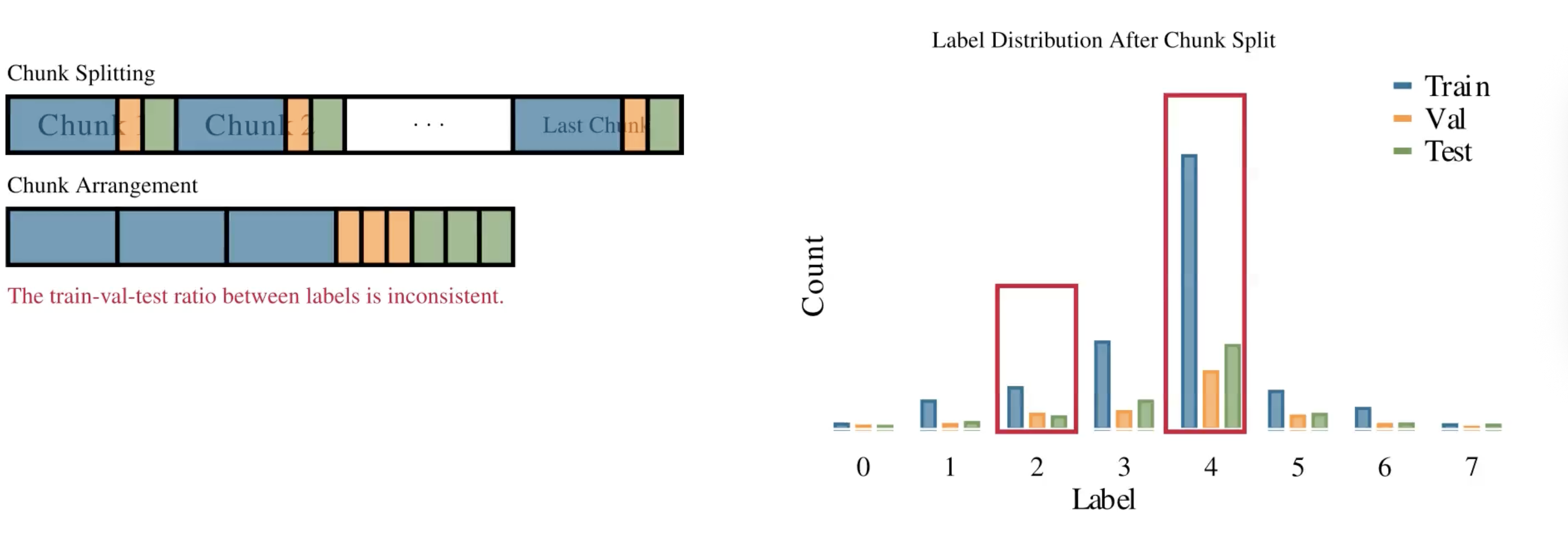 Gambar 7: Pembagian Set Data Berbongkah
Gambar 7: Pembagian Set Data Berbongkah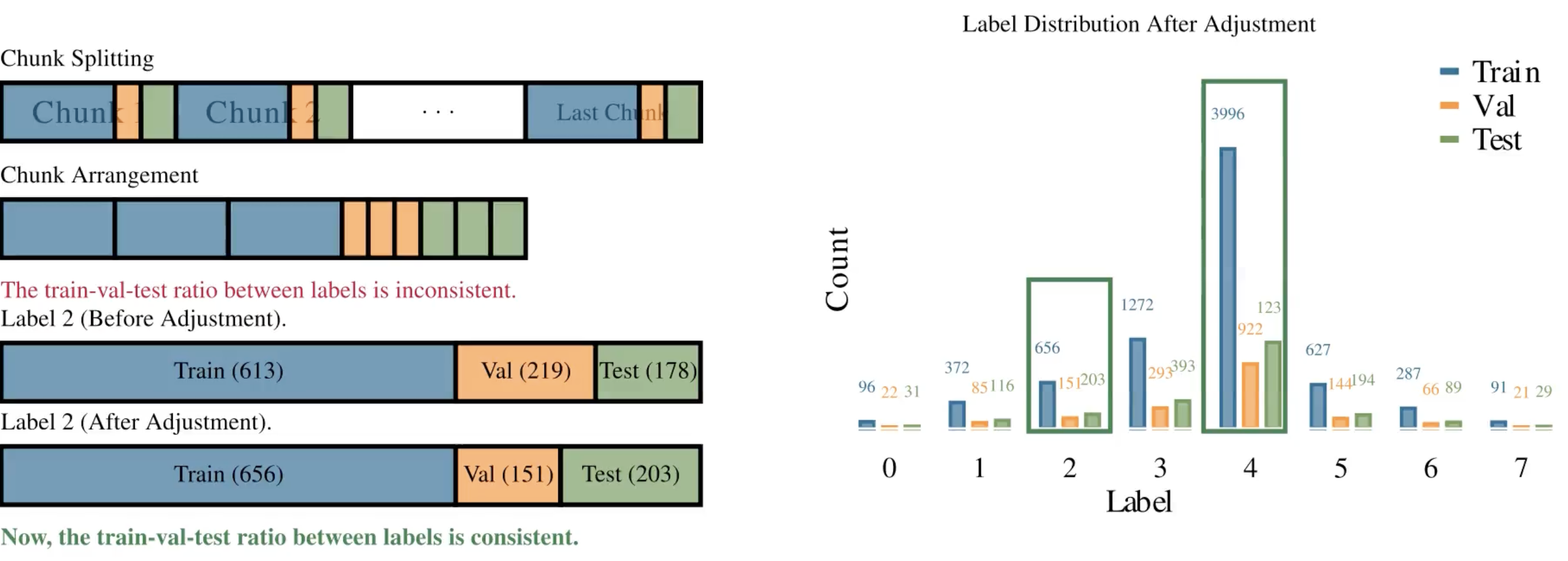 Gambar 8: Pembagian Set Data yang Disesuaikan
Gambar 8: Pembagian Set Data yang Disesuaikan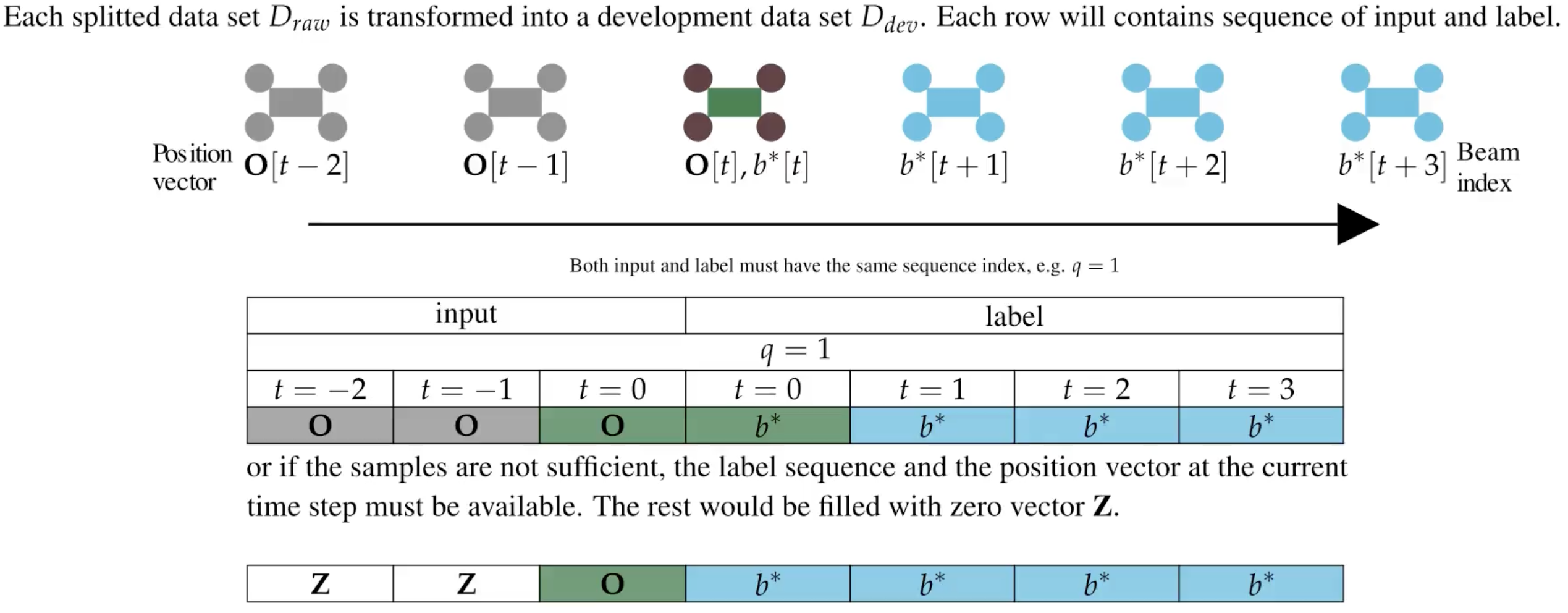 Gambar 9: Transformasi Set Data
Gambar 9: Transformasi Set Data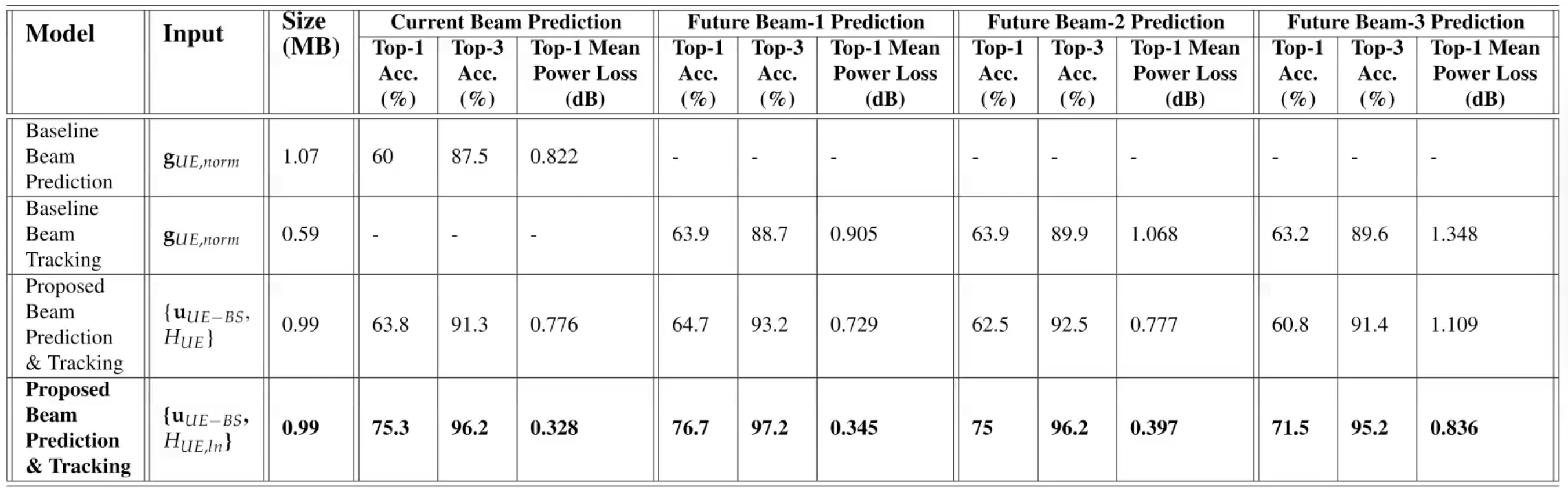 Gambar 10: Hasil Keseluruhan
Gambar 10: Hasil Keseluruhan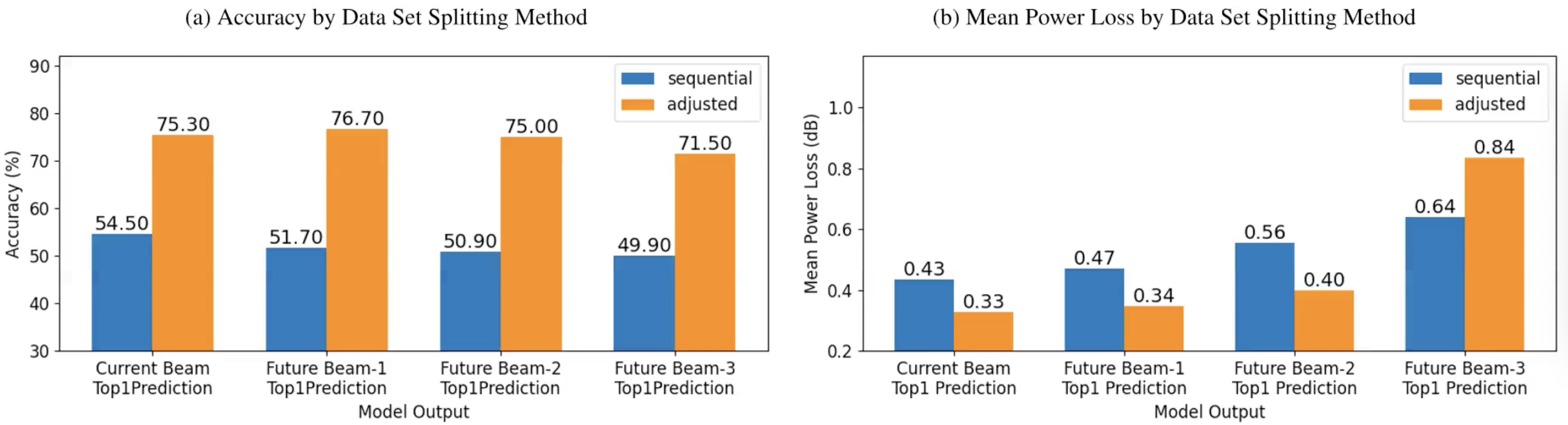 Gambar 11: Dampak Pembagian Set Data pada Kinerja Model
Gambar 11: Dampak Pembagian Set Data pada Kinerja Model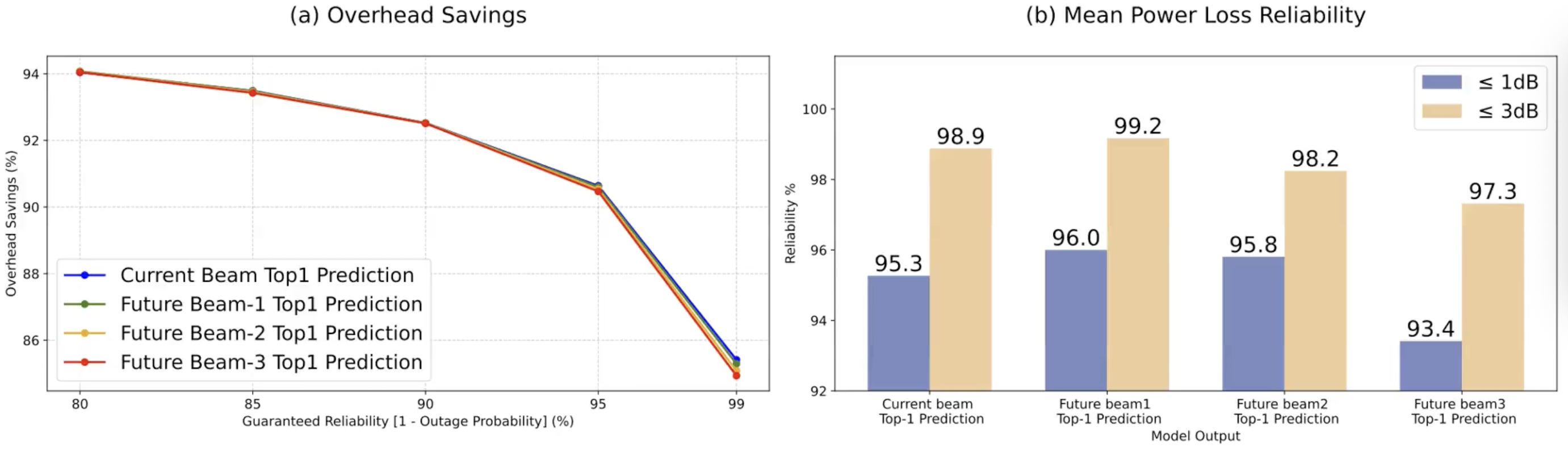 Gambar 12: Penghematan Beban Pelatihan Beam dan Keandalan Rerata Kehilangan Daya
Gambar 12: Penghematan Beban Pelatihan Beam dan Keandalan Rerata Kehilangan Daya